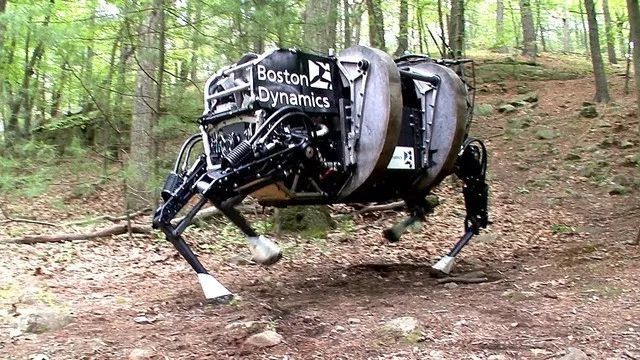
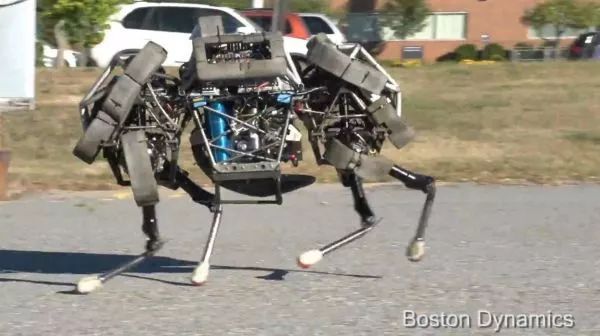
Big Dog 的机载计算机能够控制躯体移动和过程传感器,还能处理通讯。其控制系统保持躯体平衡,在不同的地形选择不同的运动和导航方式。 Big Dog 的运动感测器包括:联合位置、联结力、接地触点、接地负载、一个雷射陀螺仪、一个激光雷达和立体视觉系统。它的其他传感器则专注监测内部各项指标状态,如液压、油温、引擎功能、电池充电情况等。该研究项目由 DARPA 提供资金支持。
Little Dog(小狗)
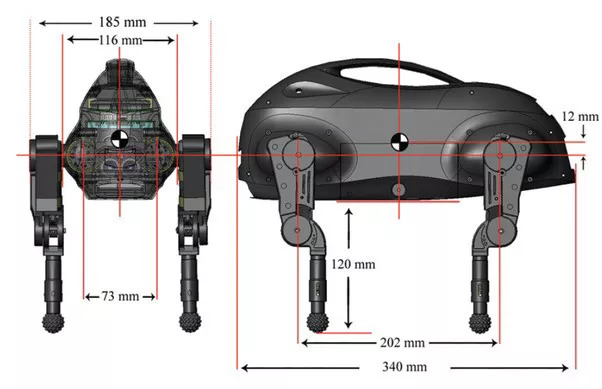
Little Dog 是一款用来研究移动的四足机器人样机,研究人员用它来探测运动学、动态控制、环境感知与复杂地形移动之间的基本关系。目前 Little Dog 在麻省理工学院、斯坦福、卡内基梅隆大学、南加州大学、宾夕法尼亚大学等高校均有所应用,同时也是 DARPA 投资的先进机器人项目。
Little Dog 有四条腿,每条腿都分别有三个电机驱动,可移动范围非常大。这个小小的机器人能够爬坡、也能实现动力学运动步态,其机载 PC 电脑随身携带的 PC 级别的电脑用控制致动器、处理传感器信号和外界交流。

 谷歌 量子霸权 再进一步,马斯克惊呼:Wow131 人气#量子计算
谷歌 量子霸权 再进一步,马斯克惊呼:Wow131 人气#量子计算 国产无人作战群曝光!无人战车+机器狼群,坦124 人气#国产珠海航展AI产品
国产无人作战群曝光!无人战车+机器狼群,坦124 人气#国产珠海航展AI产品 一镜到底,看看波士顿动力的机器人家族到底131 人气#波德顿动力
一镜到底,看看波士顿动力的机器人家族到底131 人气#波德顿动力

















 微信公众号
微信公众号 官方抖音号
官方抖音号